
Page 16 -
P. 16
게 됩 니 다. 부 가 작 용 은 데 이 터 베 이 스, D O M , 콘 솔 등 외 부 자 원 을 읽 거 나 수 정 해 야 하 는 상 황
과 관 련 이 있 습 니 다. 부 가 작 용 이 있 는 함 수 는 임 의 의 순 서 로 실 행 될 때 불 안 정 하 게 실 행 될 수 있
습 니 다. F P ( 함 수 형 프 로 그 래 밍) 과 R P ( 반 응 형 프 로 그 래 밍) 에 서 는 이 런 상 황 에 서 순 수 함 수 (p ur e
f u n cti o n)를 사 용 하 여 불 안 정 성 을 최 소 화 할 수 있 습 니 다. 그 리 고 이 방 법 은 비 동 기 코 드 를 사 용 할
때 매 우 유 용 합 니 다.
사 용 한 함 수 에 는 부 가 작 용 이 없 다 고 가 정 해 도 여 전 히 시 간 (ti m e)이 라 는 또 다 른 중 요 한 문 제 가 남
아 있 습 니 다. 1 , 2 , 3 단 계 는 작 업 성 격 에 따 라 즉 시 완 료 되 거 나 완 료 되 지 않 을 수 있 습 니 다. 그 러
므 로 각 단 계 가 올 바 른 순 서 대 로 실 행 되 게 어 떻 게 보 장 하 느 냐 가 문 제 입 니 다. 이 전 에 여 러 번 해
왔 던 것 처 럼 작 업 을 순 서 대 로 실 행 하 는 적 절 한 방 법 은 함 수 들 을 함 께 구 성 (c o m p osi n g )해 서 하 나 의
출 력 이 다 음 입 력 으 로 이 어 지 는 단 계 체 인 을 만 드 는 것 입 니 다. 단 계 의 올 바 른 순 서 를 보 장 하 는 전
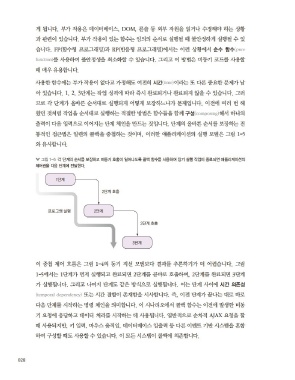
통 적 인 접 근 법 은 일 련 의 콜 백 을 중 첩 하 는 것 이 며, 이 러 한 애 플 리 케 이 션 의 실 행 모 델 은 그 림 1 -5
와 유 사 합 니 다.
그 림 1- 5 각 단 계 의 순 서 를 보 장 하 고 비 동 기 호 출 이 일 어 나 도 록 콜 백 함 수 를 사 용 하 여 장 기 실 행 작 업 이 종 료 되 면 애 플 리 케 이 션 의
제 어 권 을 다 음 단 계 에 전 달 한 다.
1 단 계
2 단 계 호 출
프 로 그 램 실 행 2 단 계
3 단 계 호 출
3 단 계
이 중 첩 제 어 흐 름 은 그 림 1 - 4 의 동 기 직 선 모 델 보 다 결 과 를 추 론 하 기 가 더 어 렵 습 니 다. 그 림
1 -5 에 서 는 1 단 계 가 먼 저 실 행 되 고 완 료 되 면 2 단 계 를 곧 바 로 호 출 하 며, 2 단 계 를 완 료 되 면 3 단 계
가 실 행 됩 니 다. 그 리 고 나 머 지 단 계 도 같 은 방 식 으 로 실 행 됩 니 다. 이 는 단 계 사 이 에 시 간 의 존 성
(t e m p or al d e p e n d e n c y ) 또 는 시 간 결 합 이 존 재 함 을 시 사 합 니 다. 즉, 이 전 단 계 가 끝 나 는 대 로 바 로
다 음 단 계 를 시 작 하 는 명 령 체 인 을 의 미 합 니 다. 이 시 나 리 오 에 서 콜 백 함 수 는 이 전 에 발 생 한 비 동
기 요 청 에 응 답 하 고 데 이 터 처 리 를 시 작 하 는 데 사 용 됩 니 다. 일 반 적 으 로 순 차 적 AJ A X 요 청 을 할
때 사 용 되 지 만, 키 입 력, 마 우 스 움 직 임, 데 이 터 베 이 스 입 출 력 등 다 른 이 벤 트 기 반 시 스 템 을 혼 합
하 여 구 성 할 때 도 사 용 할 수 있 습 니 다. 이 모 든 시 스 템 이 콜 백 에 의 존 합 니 다.
0 2 8
R x J S 코 딩 공 작 소( 본 문) 최 종.i n d d 2 8 2 0 1 9 - 1 2 - 1 2 오 전 1 0: 1 0: 0 6