
Page 15 -
P. 15
1 .1 .3 시 간 과 공 간 이 해 하 기
확 실 히 비 동 기 함 수 는 지 속 적 으 로 응 답 할 수 있 게 해 주 지 만 비 용 이 많 이 듭 니 다. 동 기 프 로 그 램 으 1
로 애 플 리 케 이 션 의 상 태 를 직 접 추 론 할 수 있 다 면, 비 동 기 코 드 로 애 플 리 케 이 션 의 미 래 상 태 를 추 반
응
론 할 수 있 습 니 다. 이 는 어 떤 의 미 일 까 요 ? 상 태 는 단 순 히 어 느 시 점 의 변 수 에 저 장 된 모 든 정 보 의 형
으
로
스 냅 샷 으 로 이 해 할 수 있 습 니 다. 이 정 보 는 일 련 의 명 령 문 으 로 작 성 되 고 조 작 됩 니 다. 동 기 코 드 는 생
각
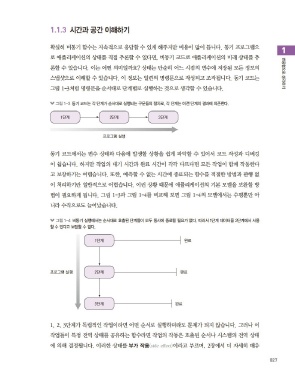
그 림 1 -3 처 럼 명 령 문 을 순 서 대 로 단 계 별 로 실 행 하 는 것 으 로 생 각 할 수 있 습 니 다. 하
기
그 림 1- 3 동 기 코 드 는 각 단 계 가 순 서 대 로 실 행 되 는 구 문 들 의 절 차 로, 각 단 계 는 이 전 단 계 의 결 과 에 의 존 한 다.
1 단 계 2 단 계 3 단 계
프 로 그 램 실 행
동 기 코 드 에 서 는 변 수 상 태 와 다 음 에 발 생 할 상 황 을 쉽 게 파 악 할 수 있 어 서 코 드 작 성 과 디 버 깅
이 쉽 습 니 다. 하 지 만 작 업 의 대 기 시 간 과 완 료 시 간 이 각 각 다 르 다 면 모 든 작 업 이 함 께 작 동 한 다
고 보 장 하 기 는 어 렵 습 니 다. 또 한, 예 측 할 수 없 는 시 간 에 종 료 되 는 함 수 를 적 절 한 방 법 과 관 행 없
이 처 리 하 기 란 일 반 적 으 로 어 렵 습 니 다. 이 런 상 황 때 문 에 애 플 리 케 이 션 의 기 본 모 델 을 보 완 할 방
법 이 필 요 하 게 됩 니 다. 그 림 1 -3 과 그 림 1 -4 를 비 교 해 보 면 그 림 1 -4 의 모 델 에 서 는 수 평 뿐 만 아
니 라 수 직 으 로 도 늘 어 났 습 니 다.
그 림 1- 4 비 동 기 실 행 에 서 는 순 서 대 로 호 출 된 단 계 들 이 모 두 동 시 에 종 료 될 필 요 가 없 다. 따 라 서 1단 계 데 이 터 를 2 단 계 에 서 사 용
할 수 있 다 고 보 장 할 수 없 다.
1 단 계 완 료
프 로 그 램 실 행 2 단 계 완 료
3 단 계 완 료
1 , 2 , 3 단 계 가 독 립 적 인 작 업 이 라 면 어 떤 순 서 로 실 행 하 더 라 도 문 제 가 되 지 않 습 니 다. 그 러 나 이
작 업 들 이 특 정 전 역 상 태 를 공 유 하 는 함 수 라 면 작 업 의 작 동 은 호 출 된 순 서 나 시 스 템 의 전 역 상 태
에 의 해 결 정 됩 니 다. 이 러 한 상 태 를 부 가 작 용 (si d e eff e ct )이 라 고 부 르 며, 2 장 에 서 더 자 세 히 배 우
0 2 7
R x J S 코 딩 공 작 소( 본 문) 최 종.i n d d 2 7 2 0 1 9 - 1 2 - 1 2 오 전 1 0: 1 0: 0 6